ROBOROO PROJECT FOR WILDLIFE RESEARCHERS
Take a look at this modular robotic system capable of teleoperated navigation, real-time target detection, and data visualization through a remote access from a Graphical User Interface (GUI) for non-invasive wildlife monitoring
brainstorming
RoboRoo is a five-person capstone project focused on creating a compact, cost-effective robotic platform for remote wildlife monitoring. To observe habitats with minimal disturbance, we designed a low-profile, camouflaged system strictly capped at a 350 AUD budget.
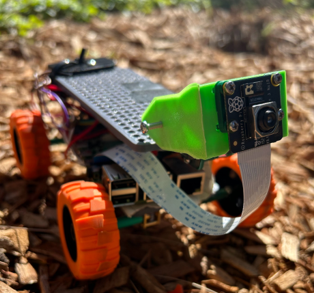
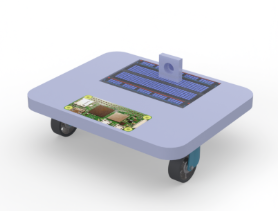
Our initial design featured a three-wheeled chassis—two driven rubber wheels and a caster—paired with a dual pan-and-tilt camera system. This provided a stabilized, flexible field of view, allowing operators to look around without reorienting the entire robot.
During early prototyping, we successfully delivered a Minimum Viable Product (MVP) that hit all our core requirements. Our first milestone tests validated the robot's stable teleoperation, responsive camera control, and stealth capabilities, proving our concept and setting a strong foundation for further refinement.
Sub-division Plan
Because Mechatronics is the physical intersection of mechanical, electrical, and software engineering, bringing RoboRoo to life required dividing our efforts into three highly focused sub-teams before integrating the final product.
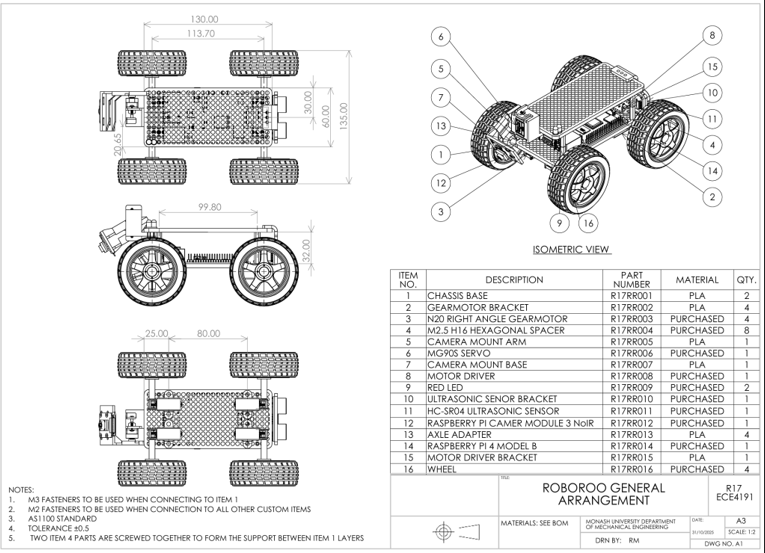
Mechanical Design & Tolerances: To conquer the 28-degree incline, the mechanical team first debated our locomotion strategy, heavily weighing the traction of tank treads against the agility and weight savings of rubber wheels. After mapping out the physics and our budget constraints, we moved forward with a wheeled custom chassi from there,we engineered the chassis base and dynamic camera mounts from scratch, using 3D-printed component.
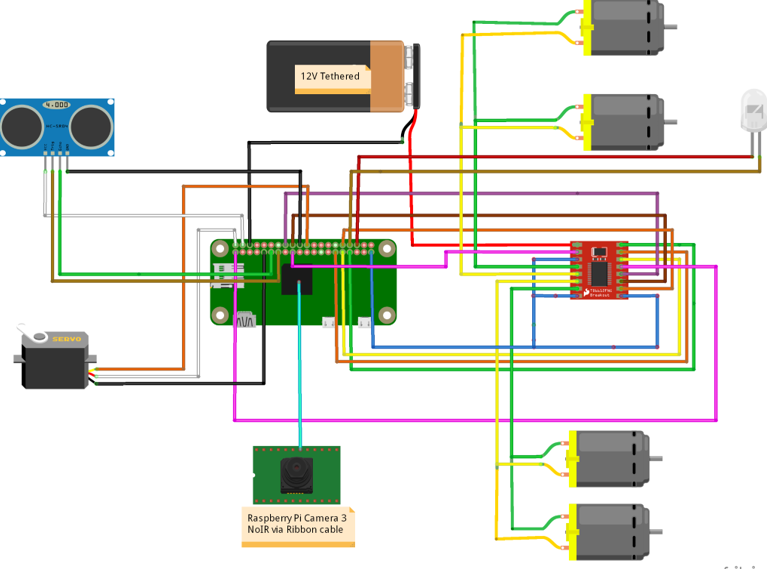
Electrical Powertrain & Integration: Meanwhile, the electrical team focused on the robot's nervous system by calculating the torque and RPM specifications our motors needed to successfully push the robot. Once the components were sourced and wired, we bridged the gap between hardware and software—running rigorous tests to validate our motor-control algorithms and ensuring flawless communication between our power distribution and the Raspberry Pi 4.
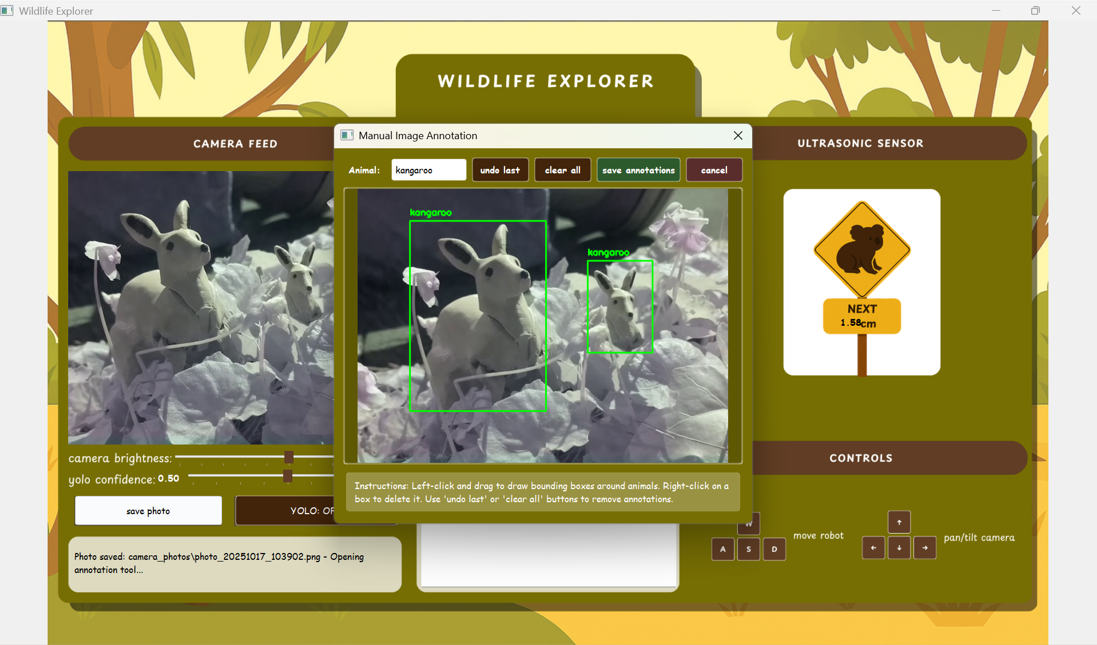
Software Architecture & AI: Finally, the software team was responsible for giving RoboRoo its autonomy by collecting and manually labeling data to train our custom AI model. To make remote teleoperation possible, we architected a robust, low-latency backend to handle continuous video and telemetry data flow. We then tied it all together by designing an intuitive GUI that allowed our isolated operator to seamlessly communicate with and control the robot.
EVERYTHING
put TO WORK
My main task was dealing with mostly hardware and software, where I needed to calculate certain torque and RPM needed for our rubber wheels to be able to climb up a terrain of 28 degrees while also staying under budget. This is when my background in Physics comes to the rescue, as these will need to be double checked multiple times before we can order the motor to arrive, and did some soldering on it.
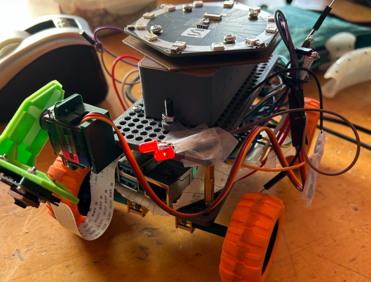
At first, I suggested using a Raspberry Pi Zero 2W, that ensure all our functionality while also being affordable, able to deliver roughly 8V to each while rotating. Then, as we were implementing everything together, from the software AI model, chassis integration, many rewiring, soldering, code implementing, the Pi Zero 2W, with limitations in RAM, hardware resources couldn't deliver enough power, and it even fried itself 2 days before demonstration day ( I learned it the hard way). We then need to spend the entire next day, and stay up until 1 am on the demonstration day, to move all the stuff into the Pi 4 (a bit more expensive), do some more calibration and testing.
Thanks to all the hard work of our team, the hardware sides and the code were running properly, on 4 wheels in less than 1 day.
FINAL suceed
The final RoboRoo project was tested on a platform, with a practical "simulated" version of wildlife animals, where our team's operator couldn't access the demonstration and could only communicate via the camera.
We successfully navigated through all 3 terrains, including a ramp that goes up to 28 degrees, and were able to secure the 2nd place for that morning session. This project was truly a reflection of how theoretical assumptions don't always work when building something, especially when you don't know what is wrong with the microcontroller when it didn't show any sign of being fried, but failed to do what we expected.
Working in this team was definitely a great learning experience for me as I learned how to adapt to changes, how to improve after making mistakes, and, more importantly, not to give up when times are tough and the deadline is approaching. Seeing the final products come to place was very rewarding, we were all proud of ourselves, and I learned a truly valuable lesson that teamwork is the key to success.